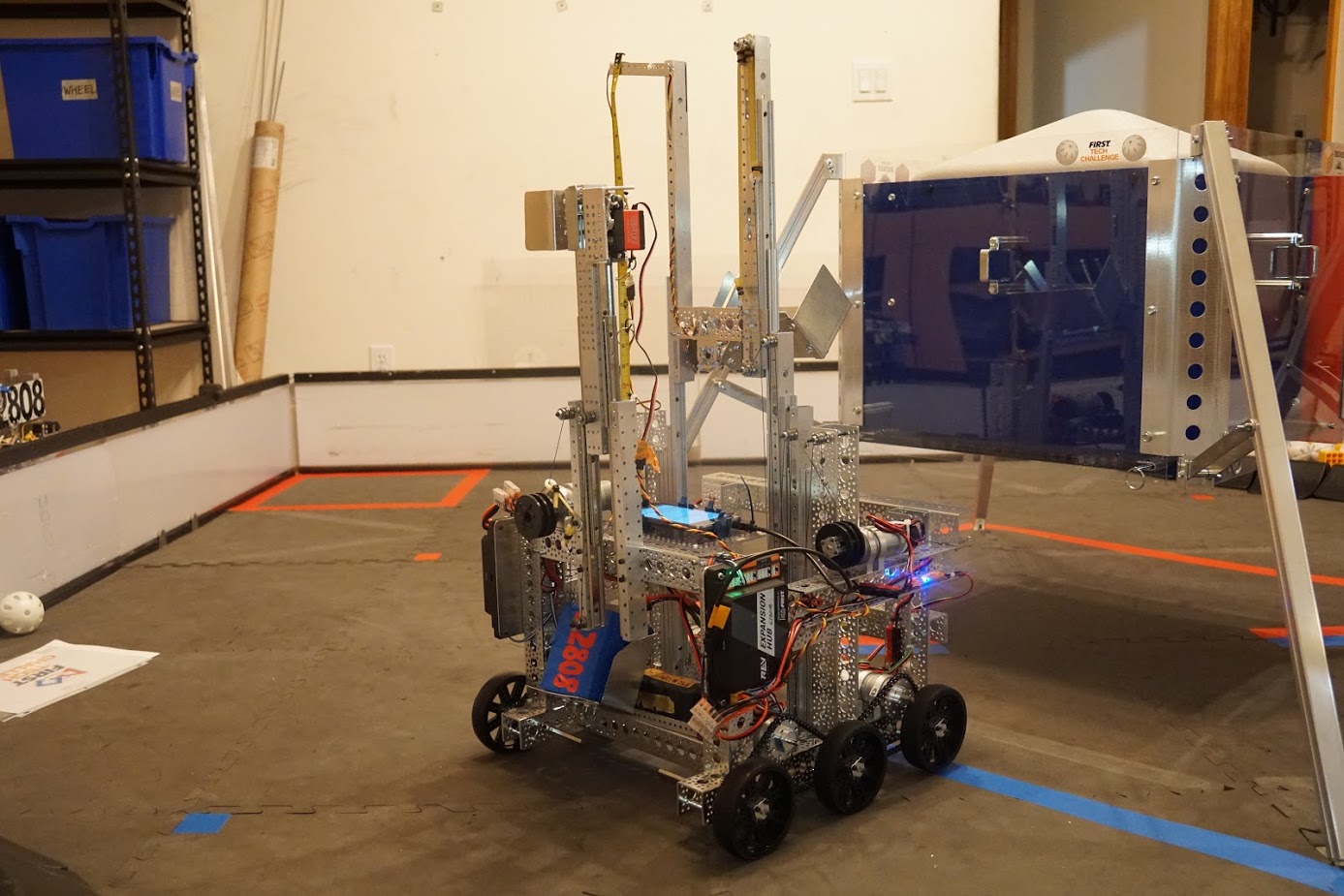
FTC Rover Ruckus Challenge
In the FTC Rover Ruckus Challenge, I was part of a robotics team that designed, programmed, and operated a robot to compete in a fast-paced, multi-phase robotics competition. The challenge included the Autonomous Period, Driver-Controlled Period, and Endgame, requiring innovative engineering and strategic gameplay.
Key Phases of the Competition
Autonomous Period
Our robot successfully performed tasks such as landing, identifying and knocking over the gold mineral, placing a team marker in the depot, and parking on the crater, achieving the maximum possible points.
Driver-Controlled Period
We excelled in collecting and sorting minerals, ensuring the gold and silver minerals were deposited in their respective locations. Our efficient and precise robot design allowed us to outperform the competition.
Endgame
We showcased our robot's advanced capabilities by latching back onto the lander and parking inside the crater, maximizing our score in the final seconds of the match.
Technical Details
We utilized a BeagleBone as the main hardware platform and developed the control logic using Python. For wireless communication, we implemented a ZigBee module, enabling seamless control and coordination during the competition.
This project honed my skills in programming, mechanical design, teamwork, and strategic thinking, further solidifying my passion for robotics and innovation.